Robot Task Planning and Explanation in Open and Uncertain Worlds
M. Hanheide, M. Göbelbecker, G. Horn, A. Pronobis, K. Sjöö, A. Aydemir, P. Jensfelt, C. Gretton, R. Dearden, M. Janicek, H. Zender, G.-J. Kruijff, N. Hawes, J. Wyatt
In: Artificial Intelligence, 247, 2017.
@article{hanheide2017ai,
author = {Hanheide, Marc and G{\"o}belbecker, Moritz and Horn, Graham S. and Pronobis, Andrzej and Sj{\"o}{\"o}, Kristoffer and Aydemir, Alper and Jensfelt, Patric and Gretton, Charles and Dearden, Richard and Janicek, Miroslav and Zender, Hendrik and Kruijff, Geert-Jan and Hawes, Nick and Wyatt, Jeremy L.},
title = {Robot Task Planning and Explanation in Open and Uncertain Worlds},
journal = {Artificial Intelligence},
year = 2017,
volume = 247,
month = jun,
pages = {119-150},
doi = {10.1016/j.artint.2015.08.008},
url = {http://www.pronobis.pro/publications/hanheide2017ai}
}



 Video of robot Dora performing open-world planning and explorationVideo of robot Dora performing open-world planning and exploration
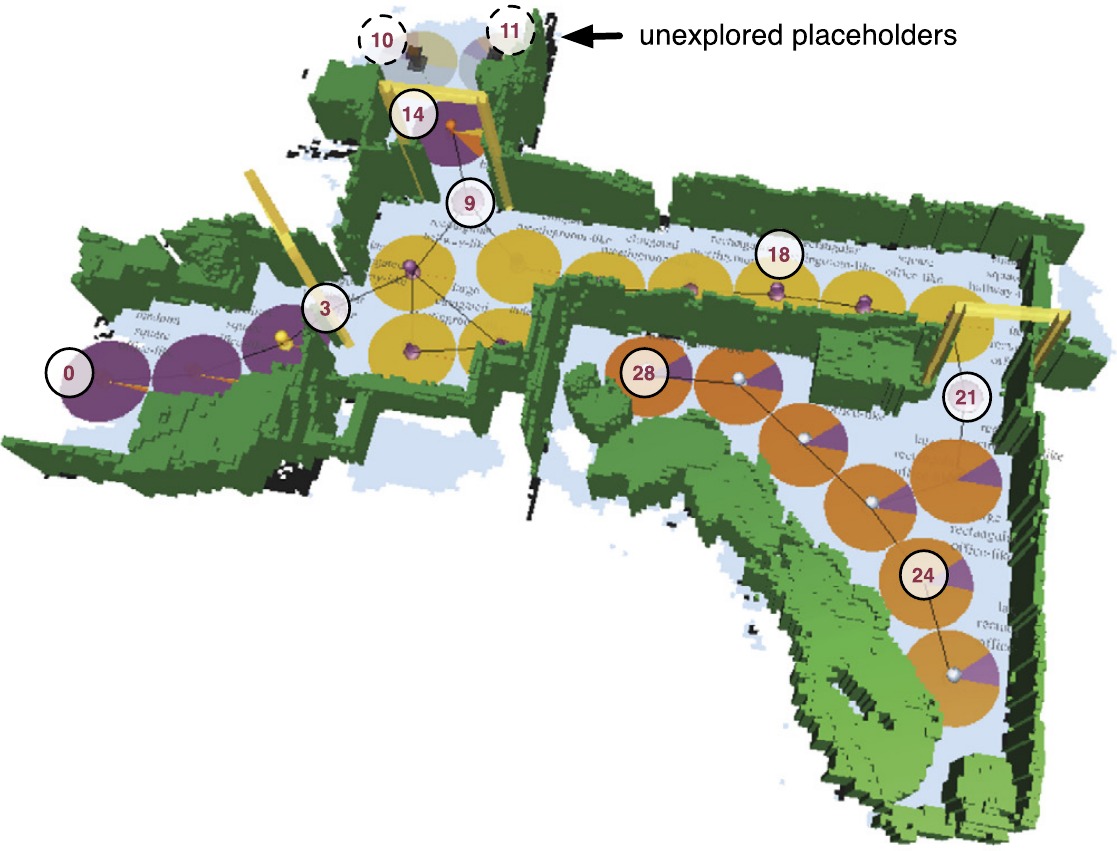
Video of robot Dora performing open-world planning and explorationVideo of robot Dora performing open-world planning and exploration The map after an object search run. Dora started in p. 0 and found object in p. 24.The map after an object search run. Dora started in p. 0 and found object in p. 24.
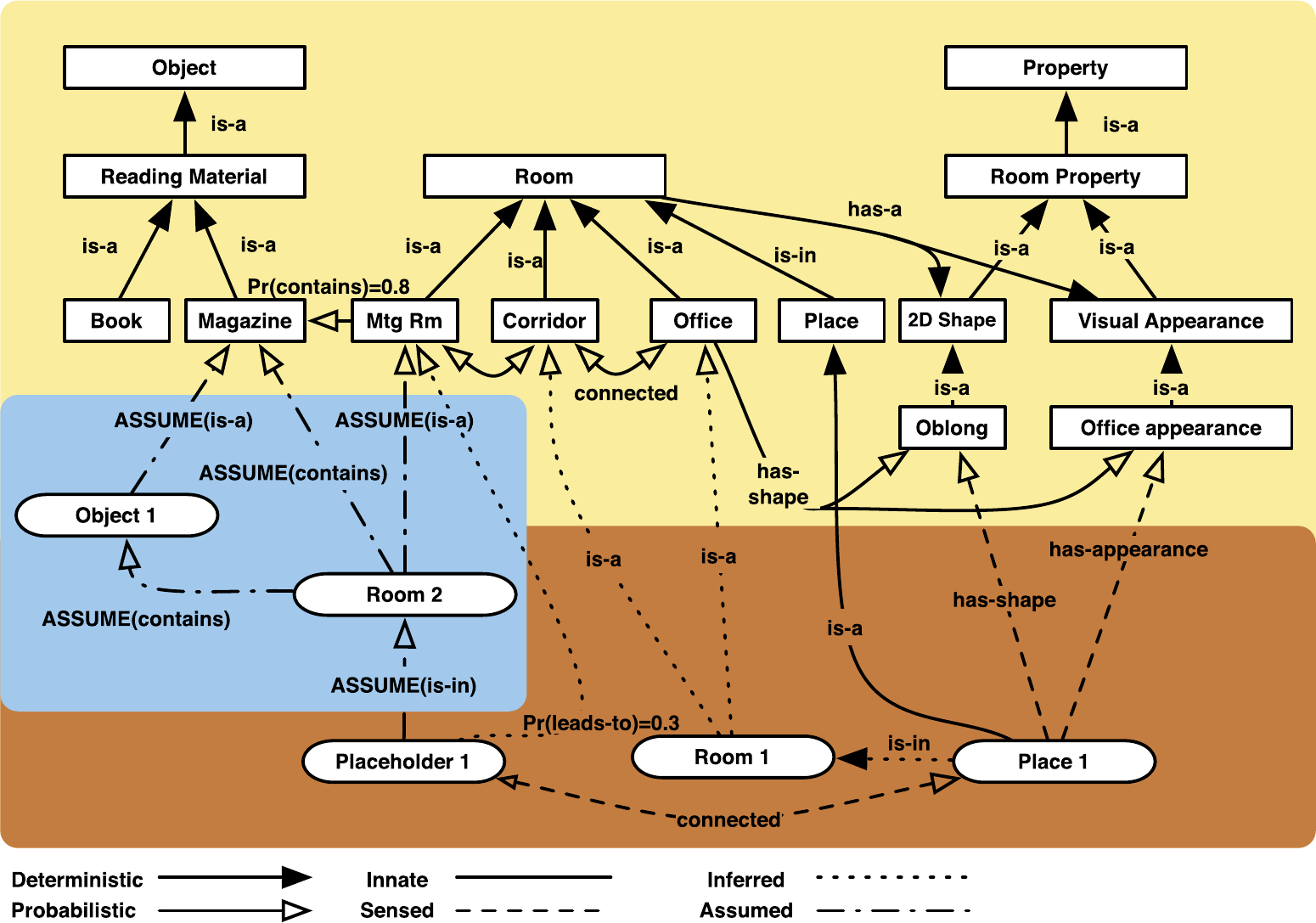
The map after an object search run. Dora started in p. 0 and found object in p. 24.The map after an object search run. Dora started in p. 0 and found object in p. 24. Instance and general knowledge, including assumptions made by the robotInstance and general knowledge, including assumptions made by the robot
Instance and general knowledge, including assumptions made by the robotInstance and general knowledge, including assumptions made by the robot