


Multi-modal Semantic Annotation of 2D Maps for Mobile Robots
About
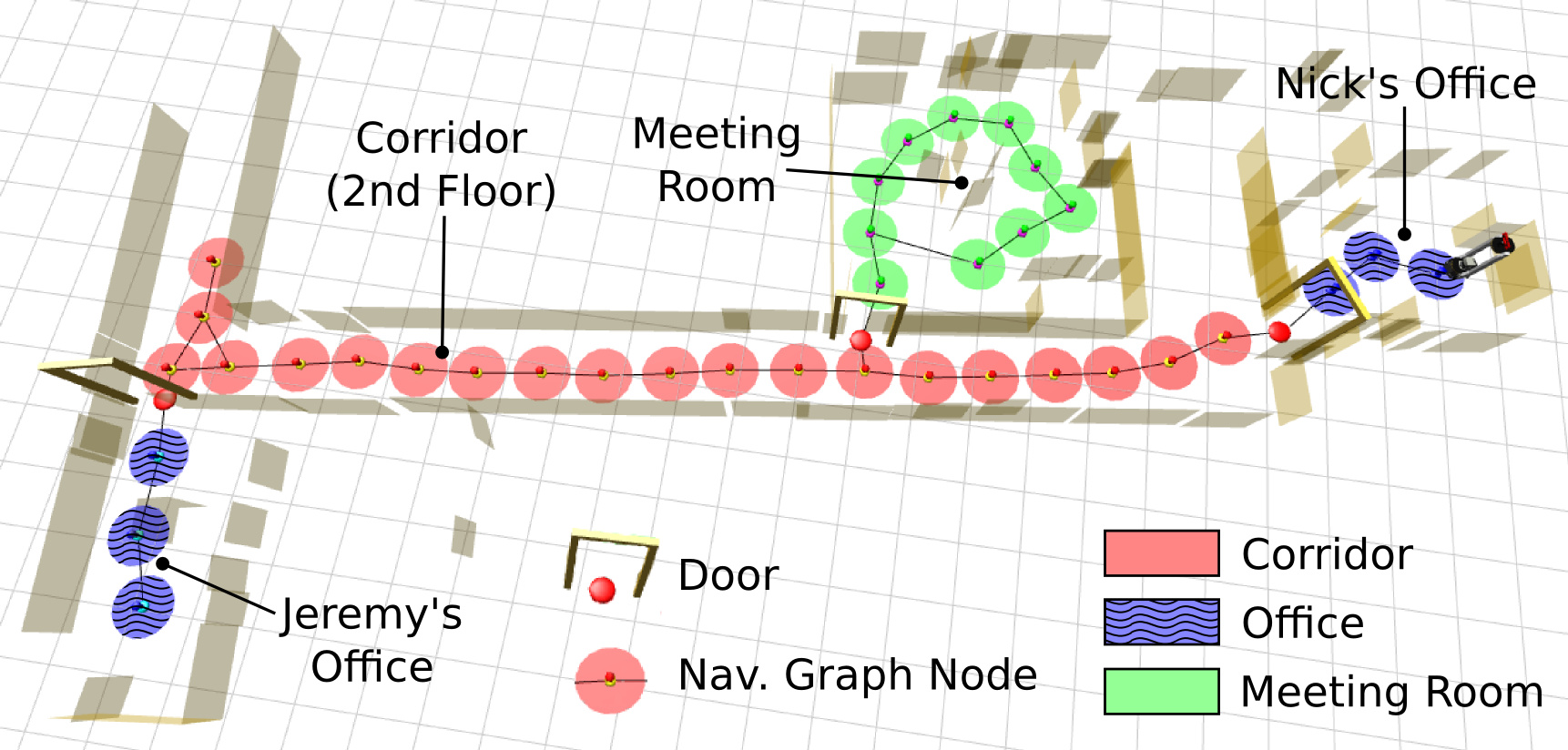
The problem of semantic annotation of space can be described as assigning meaningful semantic descriptions (e.g., "corridor" or "kitchen") to areas in the environment. Typically, semantic labeling is used as a way of augmenting the internal space representation of a robot with additional, more abstract information. This can be used by the robotic agent to enhance communication with a human user or to reason about space.
Videos
-
The video presents a real-time experiment performed at the University of Birmingham, UK. During the experiment a metric and topological map is built and annotated with semantic place information based on multi-modal sensory input (vision and laser range data).
Software
A live CD demo with the source code is available and can be used to run the above experiment in real time with a single click.
Related Publications
- Multi-modal Semantic Place Classification
, In: International Journal of Robotics Research (IJRR), 29(2-3), 2010. - Semantic Modelling of Space
, In: Cognitive Systems (H. Christensen, G.-J. Kruijff, J. Wyatt, eds.), Volume 8 of Cognitive Systems Monographs, Springer Berlin Heidelberg, 2010.