Highlights
-
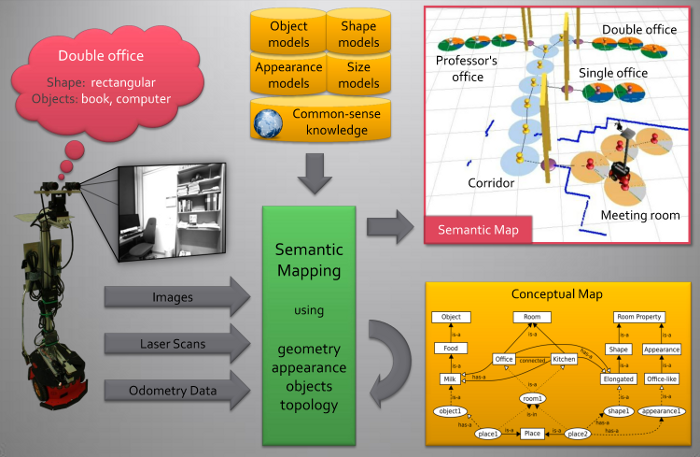
 Illustration of the semantic mapping systemIllustration of the semantic mapping system
Illustration of the semantic mapping systemIllustration of the semantic mapping system -
 Video illustrating real-time semantic mapping of an office environmentVideo illustrating real-time semantic mapping of an office environment
Video illustrating real-time semantic mapping of an office environmentVideo illustrating real-time semantic mapping of an office environment -
 Building and exploiting semantic maps for efficient object searchBuilding and exploiting semantic maps for efficient object search
Building and exploiting semantic maps for efficient object searchBuilding and exploiting semantic maps for efficient object search