


Semantic Annotation of Space - Live CD Demo
About
This page contians a real-time demonstration of the semantic space annotation system described in the following papers:
- Multi-modal Semantic Place Classification
, In: International Journal of Robotics Research (IJRR), 29(2-3), 2010. - Semantic Modelling of Space
, In: Cognitive Systems (H. Christensen, G.-J. Kruijff, J. Wyatt, eds.), Volume 8 of Cognitive Systems Monographs, Springer Berlin Heidelberg, 2010.
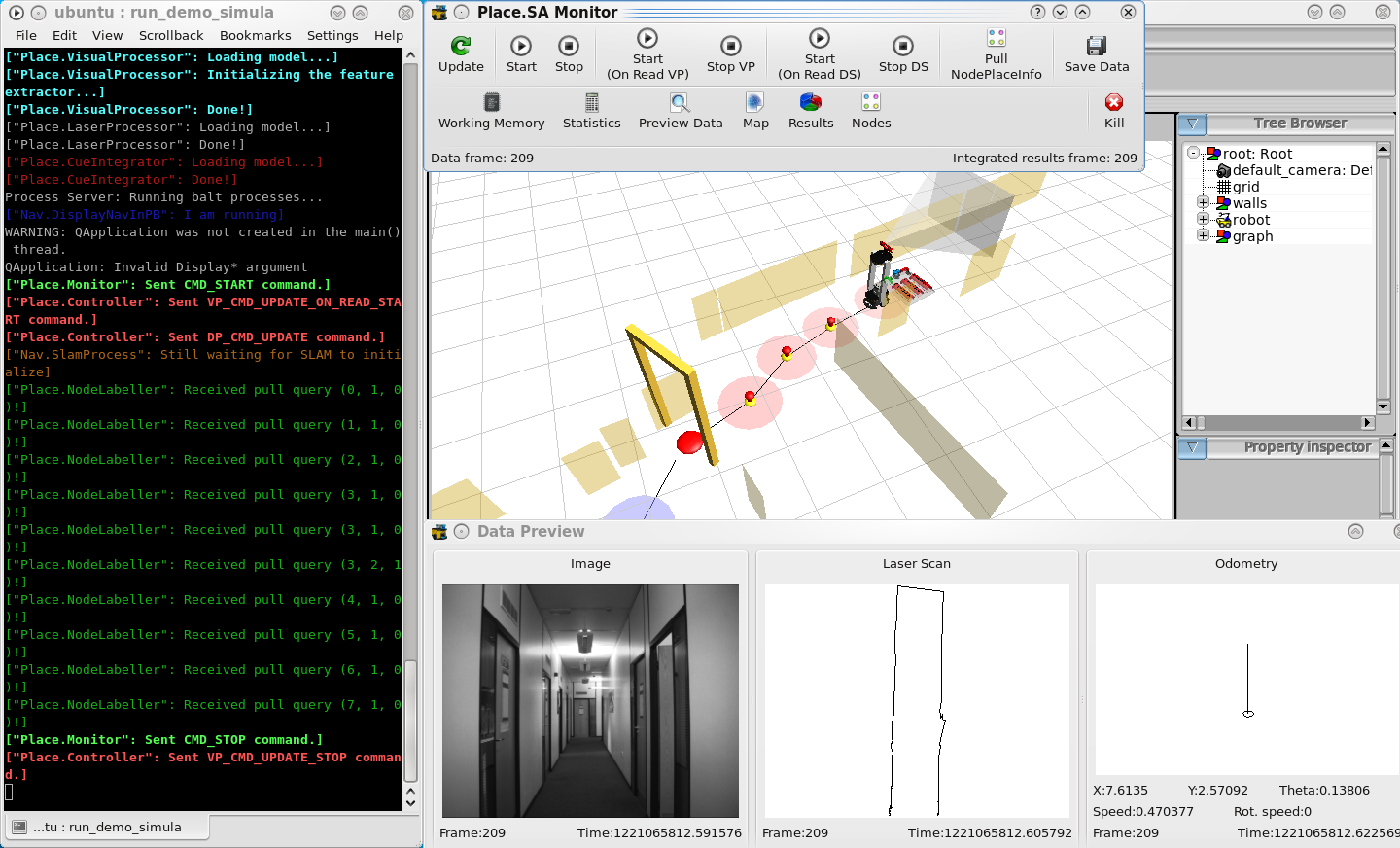
The demo is available as a LiveCD and does not require installation. It features a complete semantic annotation system that, on the basis of a stream of multi-modal data (images and laser range data), builds a metric representation of the world and annotates this representation with semantic, categorical information. The system runs in real-time on a typical laptop and visualizes the incrementally built representation of the environment on-line using the Peekabot 3D visualization software. All the source code and data used for the demonstration are included together with the system. By default, the demonstration runs on a previously captured sequence of images and laser range scans. However, it can also be started in a different mode in which data are streamed directly from robot's sensors (using Player and an interface for Videre cameras).
Download and Installation
The only steps required to setup the demo are downloading the .iso file containing the DVD image and burning that image on an empty DVD disc using your favorite DVD recording software. Please note that it is also possible to run the demo from the .iso file directly using a virtual machine such as e.g. VirtualBox (usually works only with the i386 release). The .iso image is available for two architectures:
- i386 - use this if unsure, contains two demos using both a data sequence loaded from the DVD and sensory data streamed directly from a mobile robot platform
- amd64 - contains only the demo using a data sequence loaded from the DVD
Note! We have observed visualization problems for some Intel graphics adapters (the robot is not properly displayed and the 3D visualization hangs if the robot is in the view). If the problem occurs, try using a computer with NVidia graphics.
Sources
Sources for the whole system as well as all its dependencies can be found in the /opt directory. The system is based on the CoSy Architecture Schema Toolkit (CAST) and components responsible for the semantic space annotation are located in /opt/system/subarchitectures/place.sa
Running the Demo
To run the demo, boot your computer from the DVD and select "Try Kubuntu without any change to your computer". When the system loads, click on the "Semantic Annotation of Space - Demo" icon on the desktop (large "play" button) and then click "Continue". This will start the 3D visualization software Peekabot and the demo system in another console window. If the demo fails to run the first time (due to CORBA nameserver not loaded in time), simply close all windows and run the demo again. After the demo is loaded, the robot will be visible in Peekabot and a small window will appear. To start, click on the "Start" button. To see the data streamed from the DVD and used as an input to the system (both images and laser scans), click on the "Preview Data" button. The demo should now run in real time on your system.
Note! The LiveCD Kubuntu distribution runs totally in your RAM and won't affect the system installed on your computer. However, all changes made to the system booted from the LiveCD will be lost when the system is shut down.