


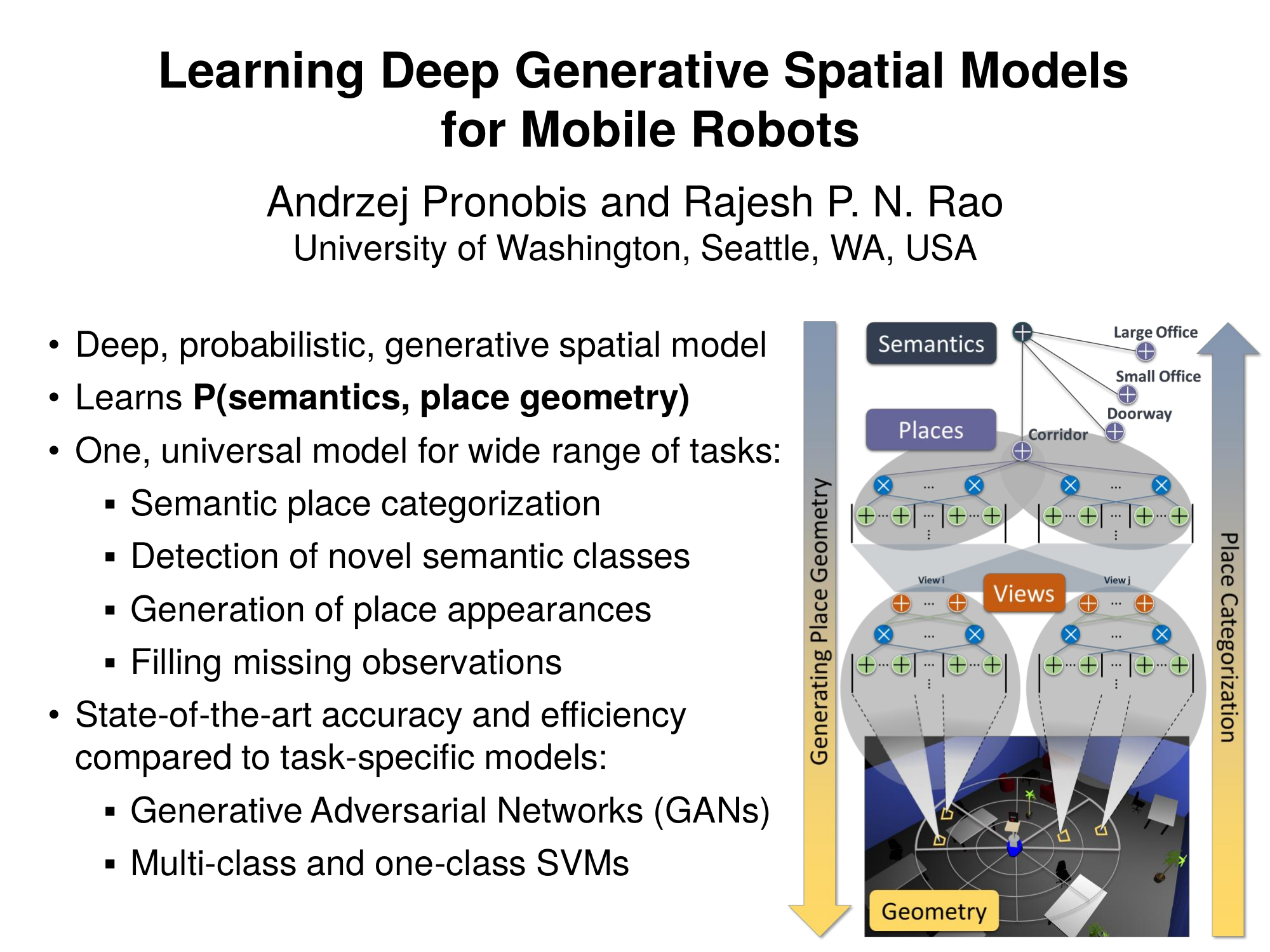
Learning Deep Generative Spatial Models for Mobile Robots
A. Pronobis, R. Rao
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2017.
About
- Paper: PDF
- DOI: 10.1109/IROS.2017.8202235
- arXiv: cs.RO/1610.02627
BibTeX
@inproceedings{pronobis2017iros,
author = {Pronobis, Andrzej and Rao, Rajesh P. N.},
title = {Learning Deep Generative Spatial Models for Mobile Robots},
booktitle = {Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = 2017,
address = {Vancouver, BC, Canada},
month = sep,
archivePrefix = {arXiv},
primaryClass = {cs.RO},
eprint = {1610.02627},
doi = {10.1109/IROS.2017.8202235},
url = {http://www.pronobis.pro/publications/pronobis2017iros}
}