


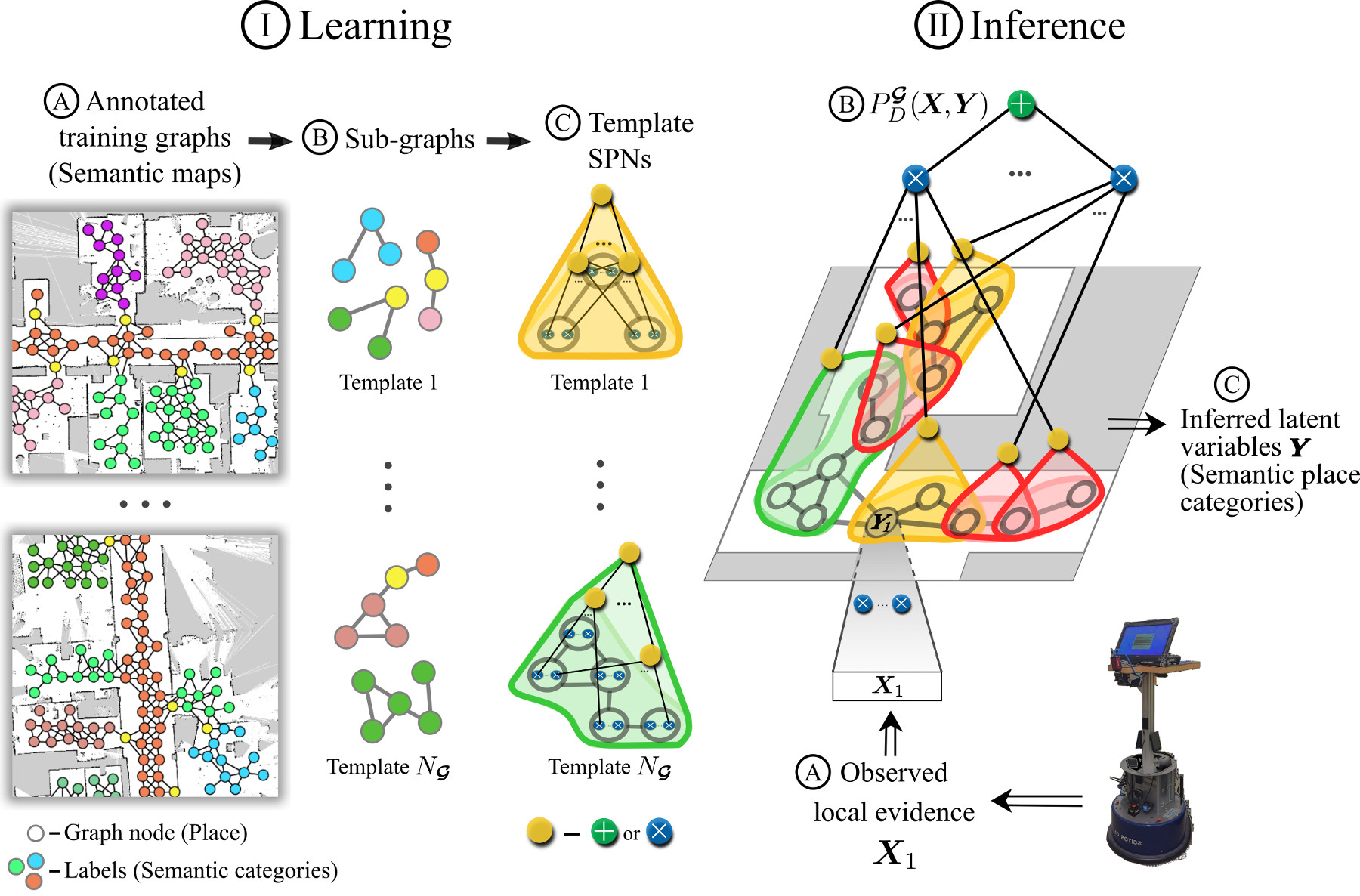
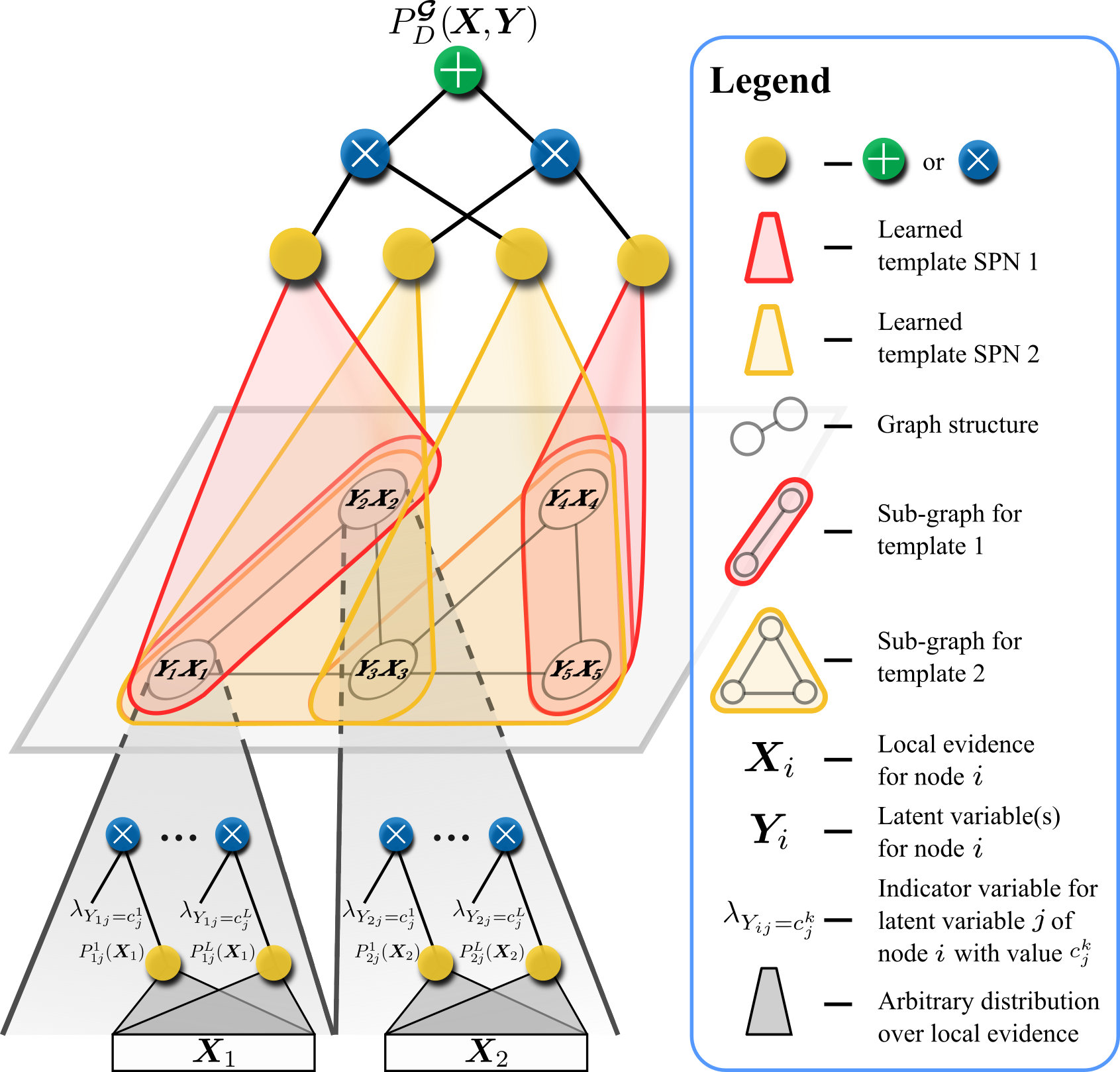
Learning Graph-Structured Sum-Product Networks for Probabilistic Semantic Maps
K. Zheng, A. Pronobis, R. Rao
In: AAAI Conference on Artificial Intelligence (AAAI), 2018.
About
- Paper: PDF
- Presentation: PDF
- arXiv: cs.LG/1709.08274
BibTeX
@inproceedings{zheng2018aaai,
author = {Zheng, Kaiyu and Pronobis, Andrzej and Rao, Rajesh P. N.},
title = {Learning {G}raph-{S}tructured {S}um-{P}roduct {N}etworks for Probabilistic Semantic Maps},
booktitle = {Proceedings of the 32nd AAAI Conference on Artificial Intelligence (AAAI)},
year = 2018,
address = {New Orleans, LA, USA},
month = feb,
archivePrefix = {arXiv},
primaryClass = {cs.LG},
eprint = {1709.08274},
url = {http://www.pronobis.pro/publications/zheng2018aaai}
}