Highlights
-
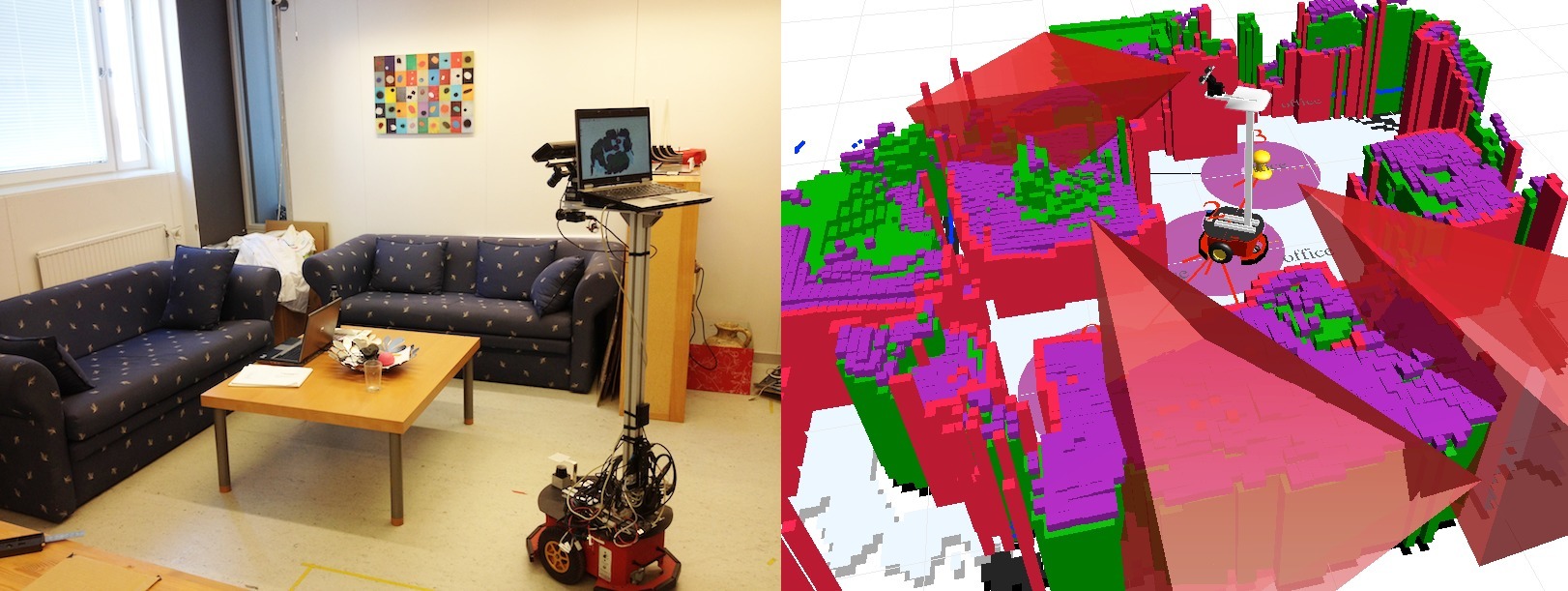
 Spatial distribution of probability of object presence and computed viewpointsSpatial distribution of probability of object presence and computed viewpoints
Spatial distribution of probability of object presence and computed viewpointsSpatial distribution of probability of object presence and computed viewpoints -
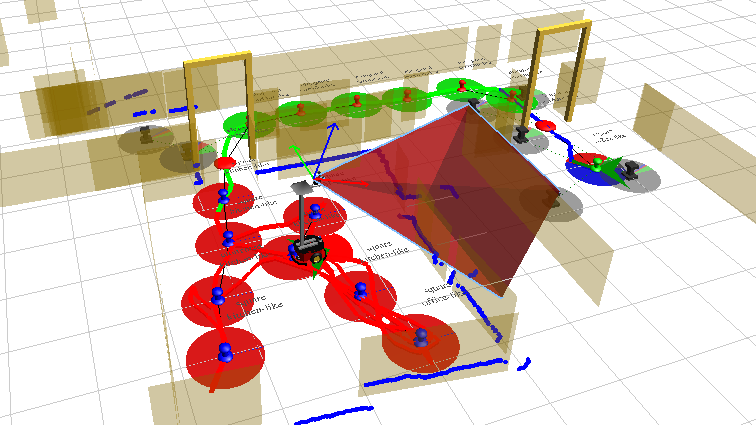
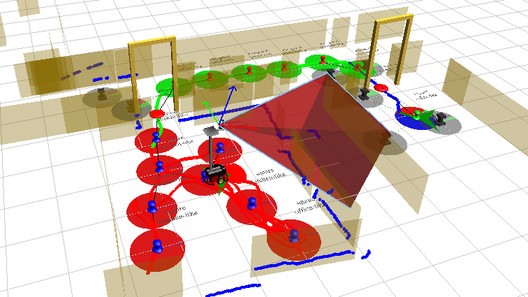 Example of a search trajectory overlaid on a semantic mapExample of a search trajectory overlaid on a semantic map
Example of a search trajectory overlaid on a semantic mapExample of a search trajectory overlaid on a semantic map -
 Exploiting probabilistic semantic knowledge for planning under uncertaintyExploiting probabilistic semantic knowledge for planning under uncertainty
Exploiting probabilistic semantic knowledge for planning under uncertaintyExploiting probabilistic semantic knowledge for planning under uncertainty -
 Object search and goal-directed exploration in an unknown indoor environmentObject search and goal-directed exploration in an unknown indoor environment
Object search and goal-directed exploration in an unknown indoor environmentObject search and goal-directed exploration in an unknown indoor environment -
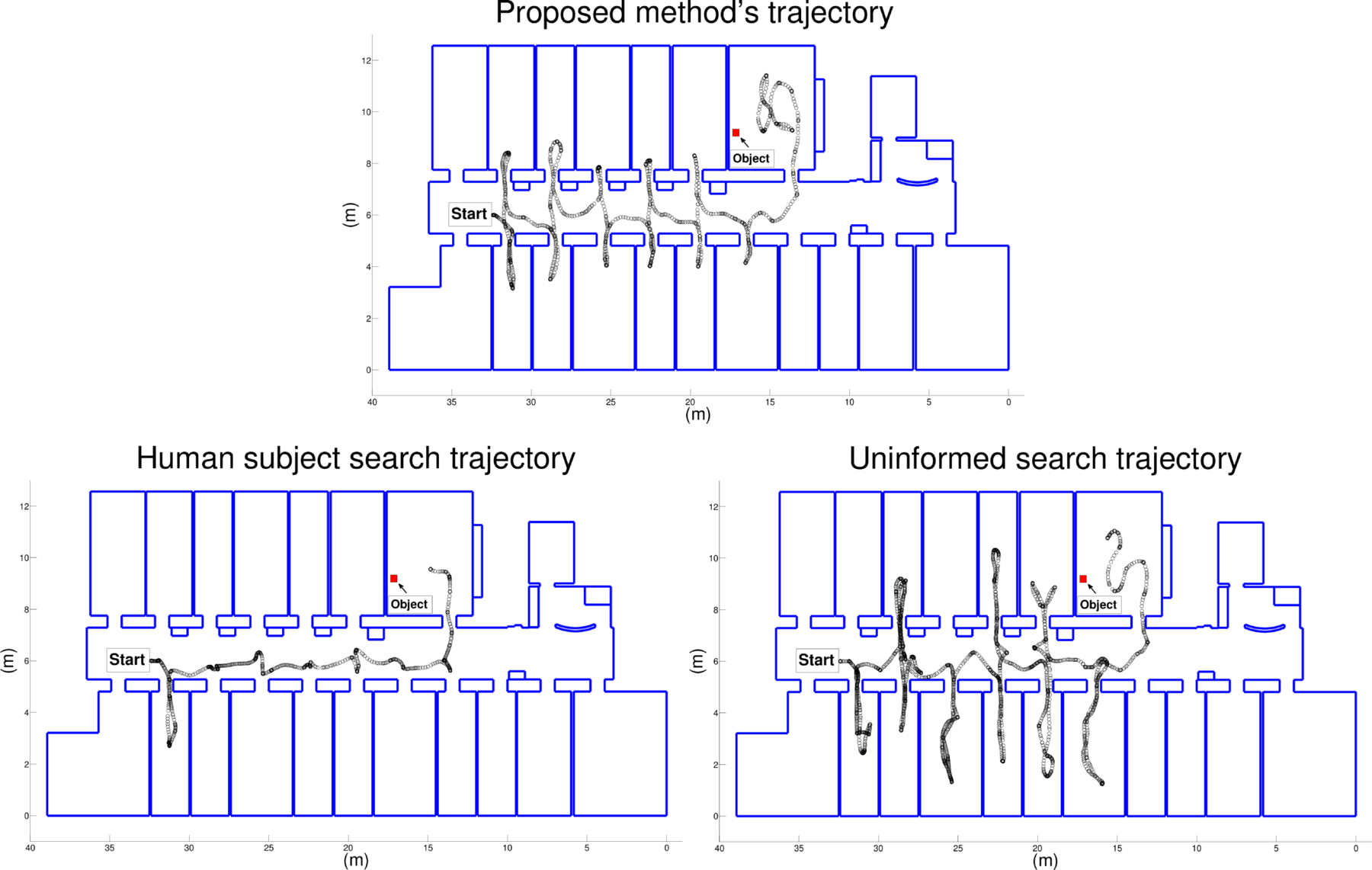
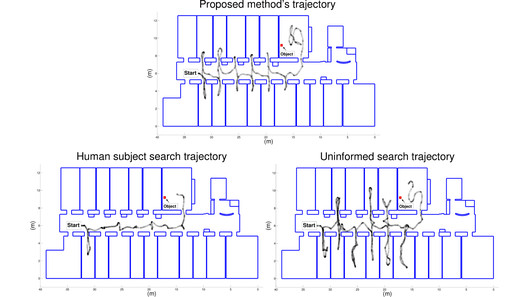 Search trajectories for teleoperated and autonomous robot exploiting or ignoring semantics.Search trajectories for teleoperated and autonomous robot exploiting or ignoring semantics.
Search trajectories for teleoperated and autonomous robot exploiting or ignoring semantics.Search trajectories for teleoperated and autonomous robot exploiting or ignoring semantics.