Advised M.Sc. and B.Sc. Theses
Kaiyu Zheng, UW, B.Sc. 2017
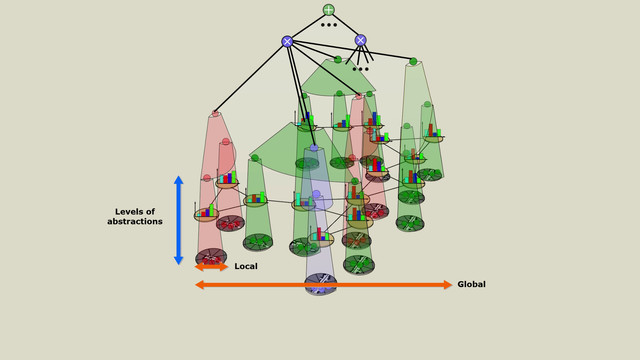
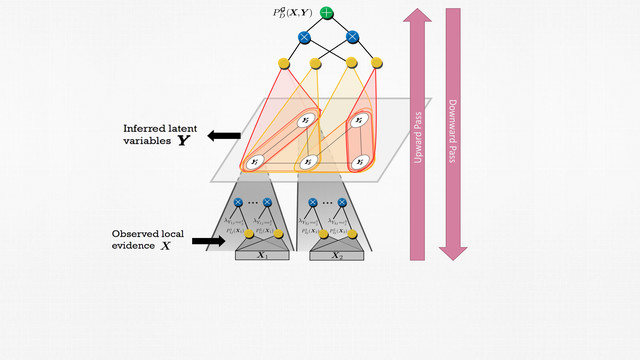
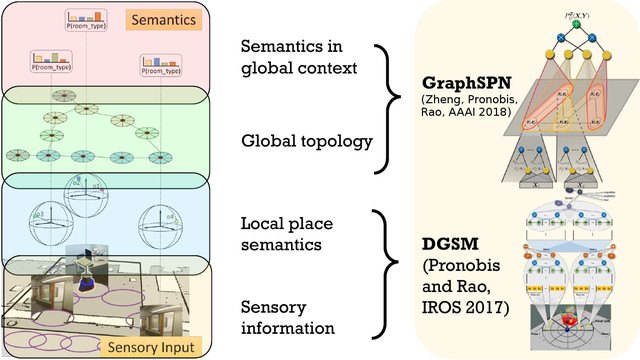
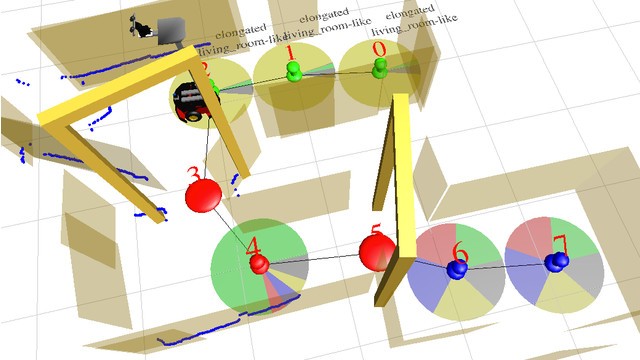
"Learning Large-Scale Semantic Maps with Sum-Product Networks"
Shortlisted for the UW CSE Best Senior Thesis Award
Kousuke Ariga, UW, B.Sc. 2017
"Semi-Supervised Spatial Knowledge Transfer with Deep Generative Models"
Shortlisted for the UW CSE Best Senior Thesis Award
Björgvin Ólafsson, KTH, OculusAI, M.Sc. 2016
"Partially Observable Markov Decision Processes for Faster Object Recognition"
Andreas Bruse, KTH, OculusAI, M.Sc. 2015
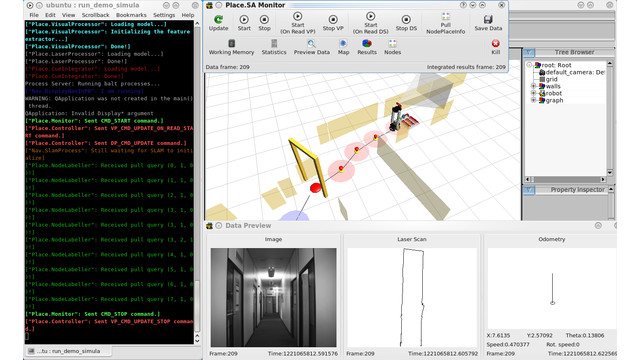
"Exploiting Cloud Resources For Semantic Scene Understanding On Mobile Robots"
Nima Behzad, KTH, M.Sc. 2013
"Modeling 3D Object Context"
Nikolaus Demmel, KTH, B.Sc. 2012
"Detecting Novel Concepts in Semantic Mapping with Mobile Robots"
André Susano Pinto, KTH, M.Sc. 2011
"Novelty Detection for Semantic Place Categorization"
Li Xing, KTH, M.Sc. 2010
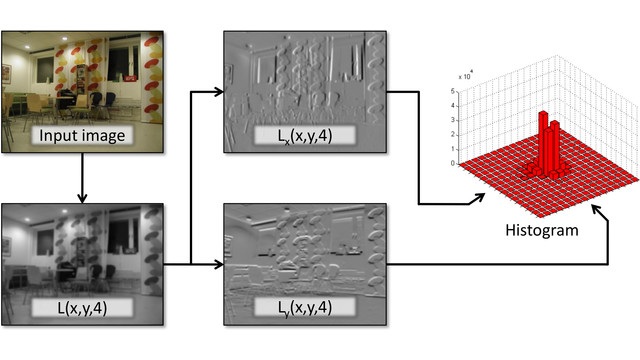
"Multi-cue Visual Place Classification for Mobile Robotic Systems"
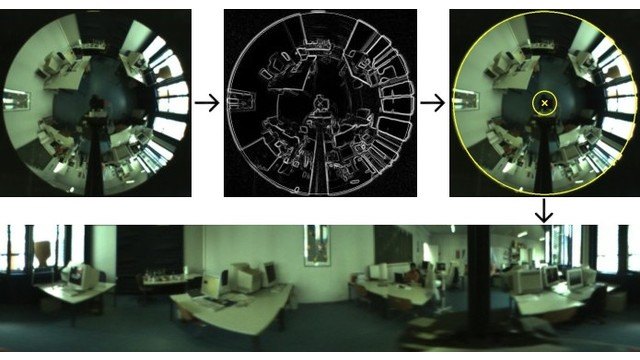
Muhammad Muneeb Ullah, KTH, M.Sc. 2007
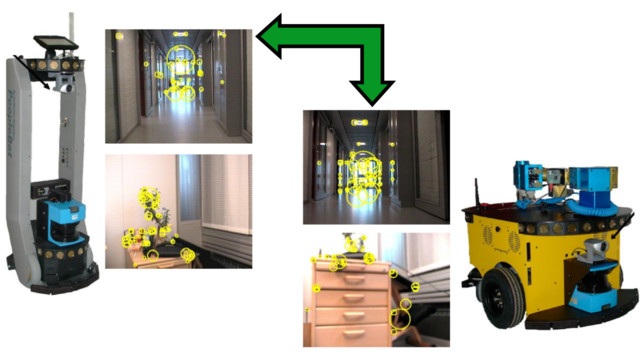
"Vision-based Indoor Place Recognition using Local Features"
Jie Luo, KTH, M.Sc. 2007
"Incremental Learning for Adaptive Visual Place Recognition in Dynamic Environments"
Best Master’s thesis award of the Swedish AI Society